如何使用无线电模块在家中制作Arduino手势控制机器人
 0
0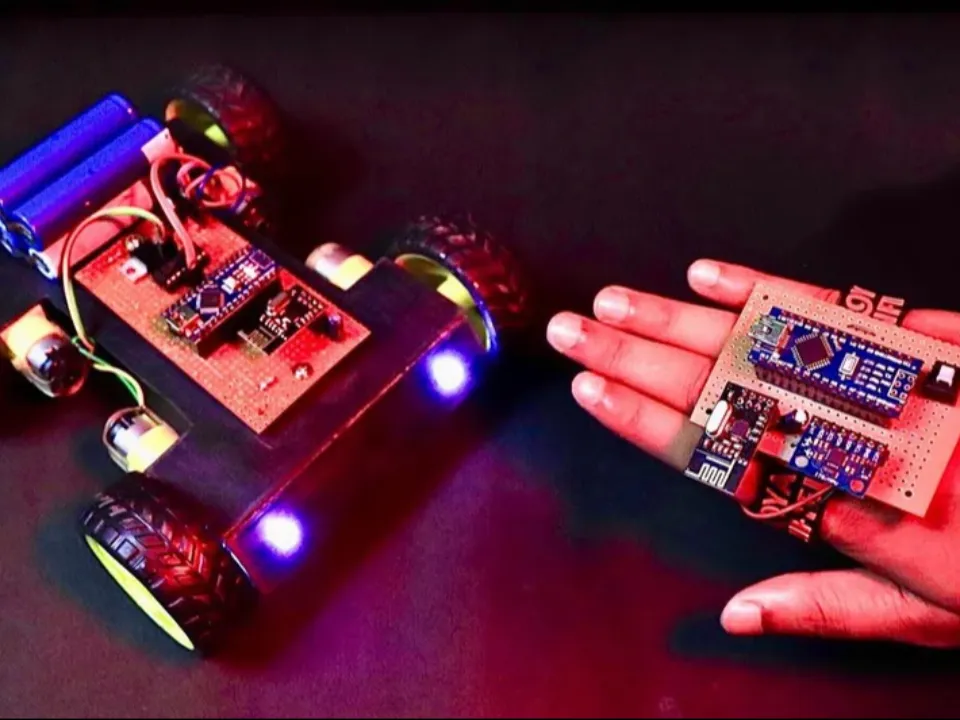
让我来看看这个项目的功能!就像通常使用遥控器运行的无线电遥控汽车一样,这辆机器人汽车是无遥控的!
我的意思是它没有遥控器来控制按钮来向上、向下、向右和向左移动。
准备工作:
材料:
材料名称
数量
备注
LED灯
1
双面胶带
1
空PCB板
1
热熔胶
1
L293D电机驱动
1
腕带
1
9V电池和支架
1
Tip32晶体管
1
NRF 24L01无线模块
1
MPU6050模块
1
Arduino nano
1
纸板
1
直流电机和轮胎
1
工具:
工具名称
数量
备注
烙铁
1
1
底盘制作














2
发射器电路








3
接收器电路










4
完成电路






5
编程和设置发射器






6
编程和设置接收器





7
使用





 0
0 0
0 0
0 微信
微信  qq空间
qq空间  微博
微博  贴吧
贴吧  复制链接
复制链接 猜你喜欢
评论/提问(已发布 0 条)