乐高机械蜘蛛
 0
0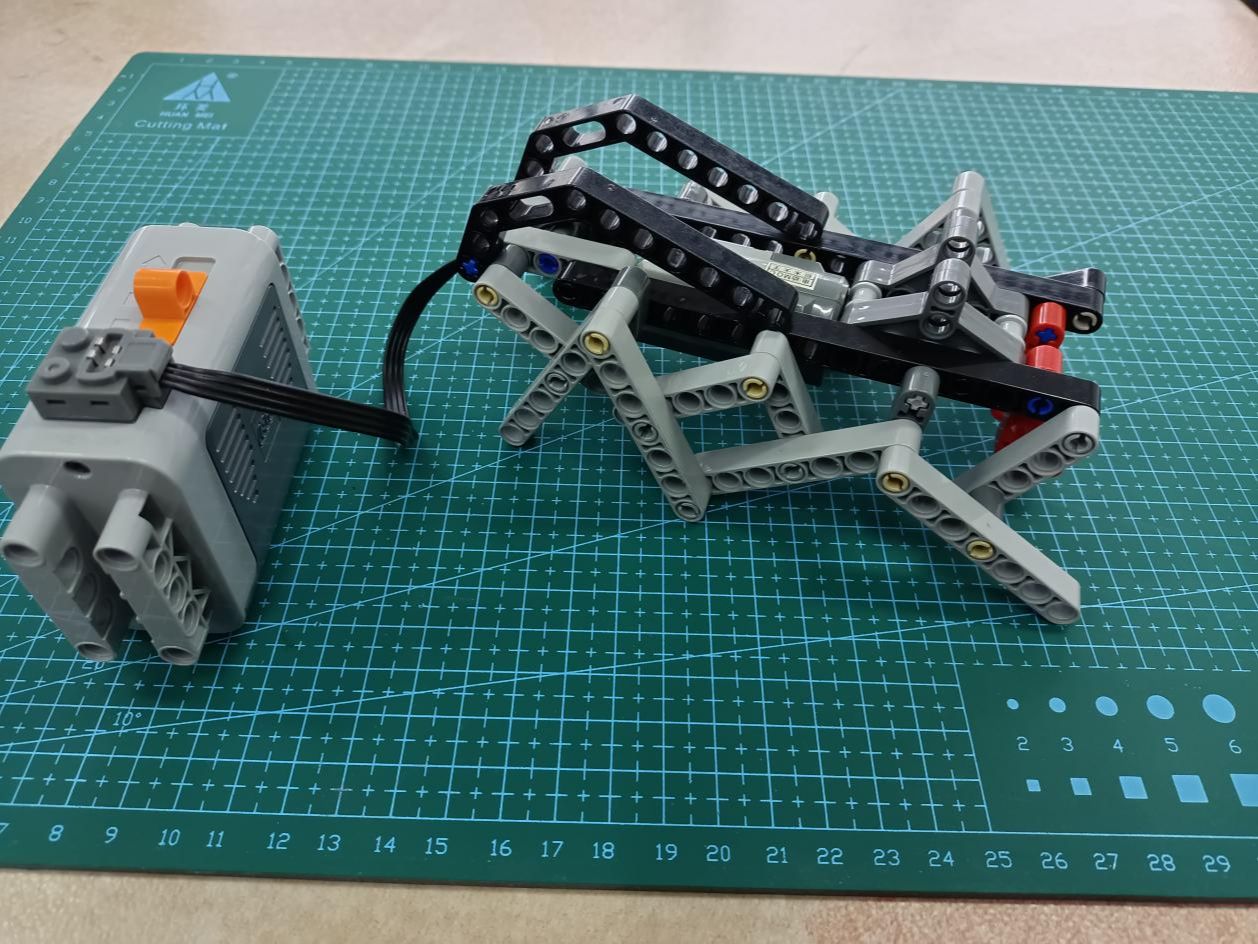
这是我用乐高做的一个仿生爬行蜘蛛,主要结构件是乐高的科技类零件,动力来源是一个乐高小型电机,你可以用专用的电池盒,控制它前进后退,目前并不能左右转向。
我先把图片放前面,方便你更快的看到它,这关系到你会不会也想要做一个。
准备工作:
材料:



材料名称
数量
备注
乐高零件
若干
见下图
乐高电机、乐高电池盒
1
见下图
干电池
6
5号/用于给乐高电池盒供电
工具:
工具名称
数量
备注
无
1
制作电机的动力变向及减速装置







2
身体及四肢










3
对称制作蜘蛛的另一半腿






4
组合


5
装饰






6
连接电机及操作

 0
0 0
0 0
0 qq空间
qq空间  微博
微博  复制链接
复制链接 猜你喜欢
评论/提问(已发布 0 条)