MC1 避障机器人
 0
0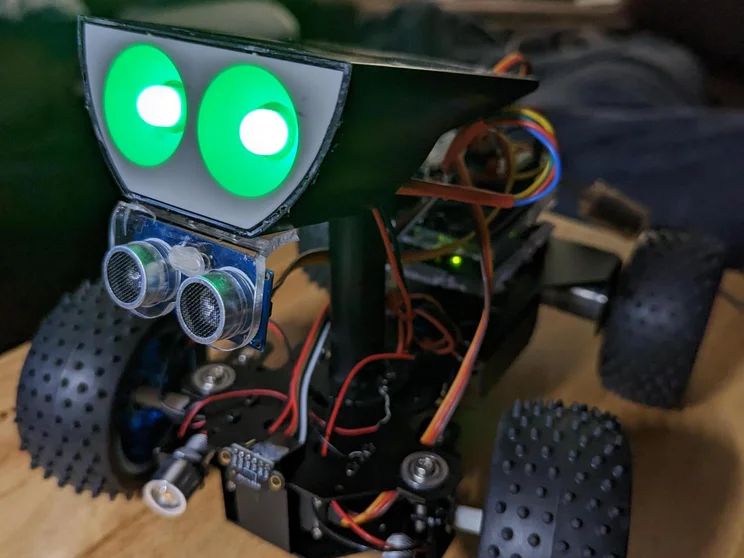
我需要一个平台来测试物体上的超声波测距传感器(基于声音)和 LIDAR 传感器(基于飞行时间 - 激光反射的 ToF),并认为将一个小型机器人组装在一起作为测试平台会很有趣。使用这两种设备的组合,我制作了一个避障机器人。目前,它只是绕过避开没有真正目标的障碍物的工具。
准备工作:
材料:
材料名称
数量
备注
Arduino UNO R3
1
Arduino 电机扩展板
1
面包板及制作扩展版的街头
1
10mm RGB 共阳极漫射 LED
1
DROK SMPS 电源
1
将 8.4VDC 电池转换为 5VDC 以驱动转向舵机
超声波 型号 HC-SR04
1
VL53L0X 飞行时间距离传感器
1
1
2 个驱动电机和一个伺服转向的裸底盘

2
连接 Arduino UNO




3
LED EYE 带来乐趣和反馈




4
构建“面包板防护板”




5
连接 EYE LED 和电源转换器电路




6
电池电源

7
超声波换能器


8
VL53L0X飞行时间飞行距离测量传感器


 0
0 0
0 0
0 qq空间
qq空间  微博
微博  复制链接
复制链接 猜你喜欢
评论/提问(已发布 0 条)