我手头有空心杯812电机及桨叶,所以决定用STM32F103做驱动,8M的晶振,用PWM驱动AO3400A控制电机,用CH340N串口芯片,陀螺仪是MPU6050,还有WF280A气压计,只留了一个SW调试接口,一个串口,
我的硬件布局是:飞控PCB硬件连接表,主控芯片 STM32F103C8T6
SI24R1硬件连接:
PA4 --------- CE
PA8 ---------- IRQ
PB12 --------- CSN
PB13 --------- SCK
PB14 --------- MISO
PB15 --------- MOSI
MPU硬件连接:
PB6 --------- SCL
PB7 --------- SDA
气压计硬件连接:
PB10 --------- WF280A_SCL
PB11 --------- WF280A_SDA
串口硬件连接:
PA9(TX) ----- RX (CH340N)
PA10(RX) ---- TX (CH340N)
SW调试下载口:
PA13 -------- SWDIO
PA14 -------- SWCLK
复位硬件连接:
BOOT0 ------ BOOT0
PB2 ---------- BOOT1
晶振硬件连接:
PC14 -------- OSC32-IN
PC15 -------- OXC32-OUT
PD0 -------- OSC-IN
PD1 -------- OSC-OUT
电机马达:
PA0 -------- 1前左
PA1 -------- 2前右
PA2 -------- 3后左
PA3 -------- 4后右
LED指示灯硬件连接:
PA6 -------- LEDr
PA7 -------- LEDg
PB0 -------- LEDb
我开始计划用1503来做,后来改的空心杯,为了能兼容大电池,我把板子做成了18600 2S盒子的大小,做了一个长方形,倒了个圆角。
我把主控芯片放到中心的位置,前面放的是MPU6050模块8针接口,下方是S24R1 8针接口,右面是串口电源接口,电源开关,四个角是AO3400A。
总的来说还可以,计划用热熔胶固定,所以也没有留螺丝孔,实际使用还是得用螺丝固定好。
 0
0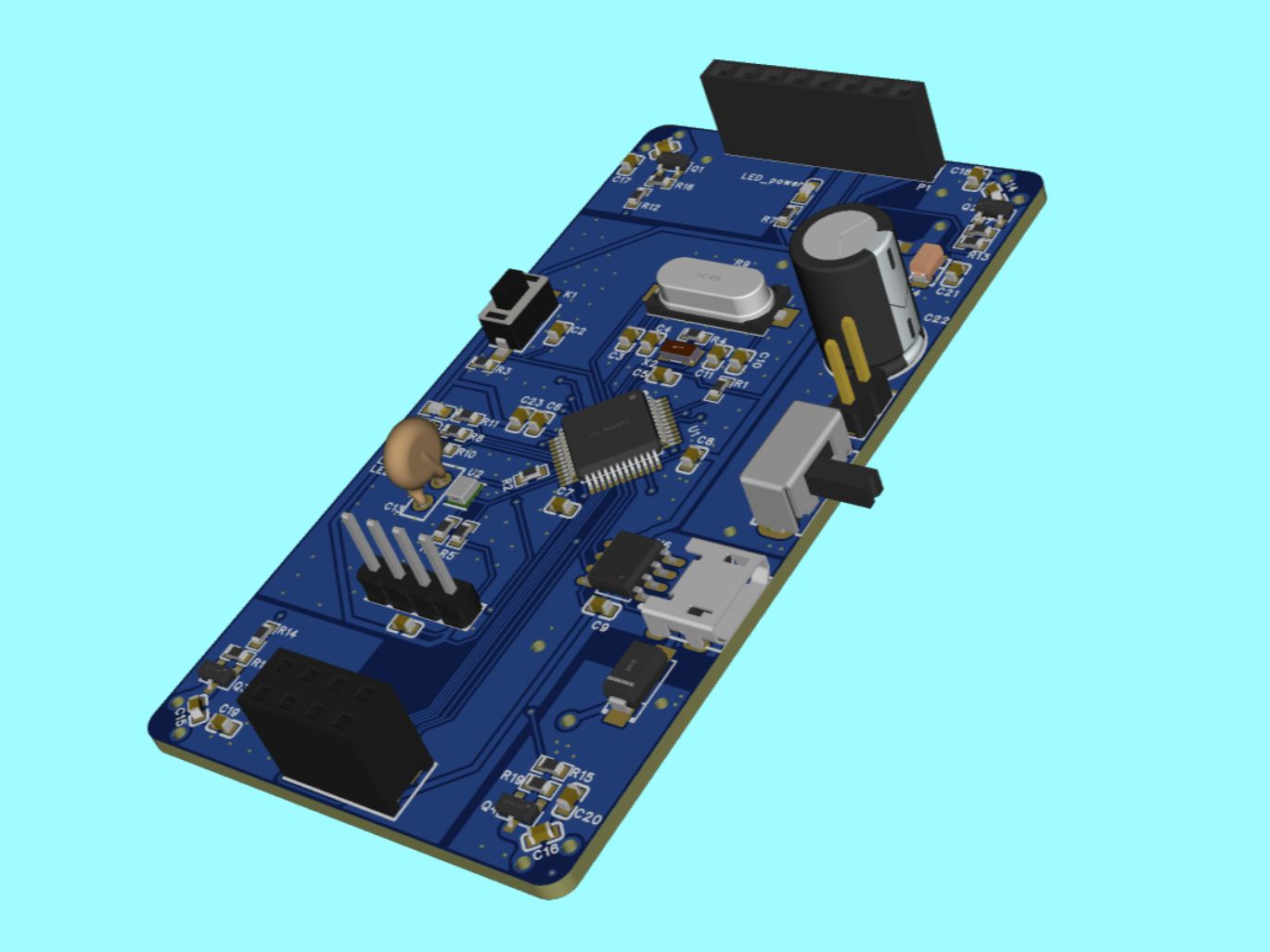









 0
0 0
0 0
0 qq空间
qq空间  微博
微博  复制链接
复制链接