PS摇杆UNO小车-有线版本1.0
 0
0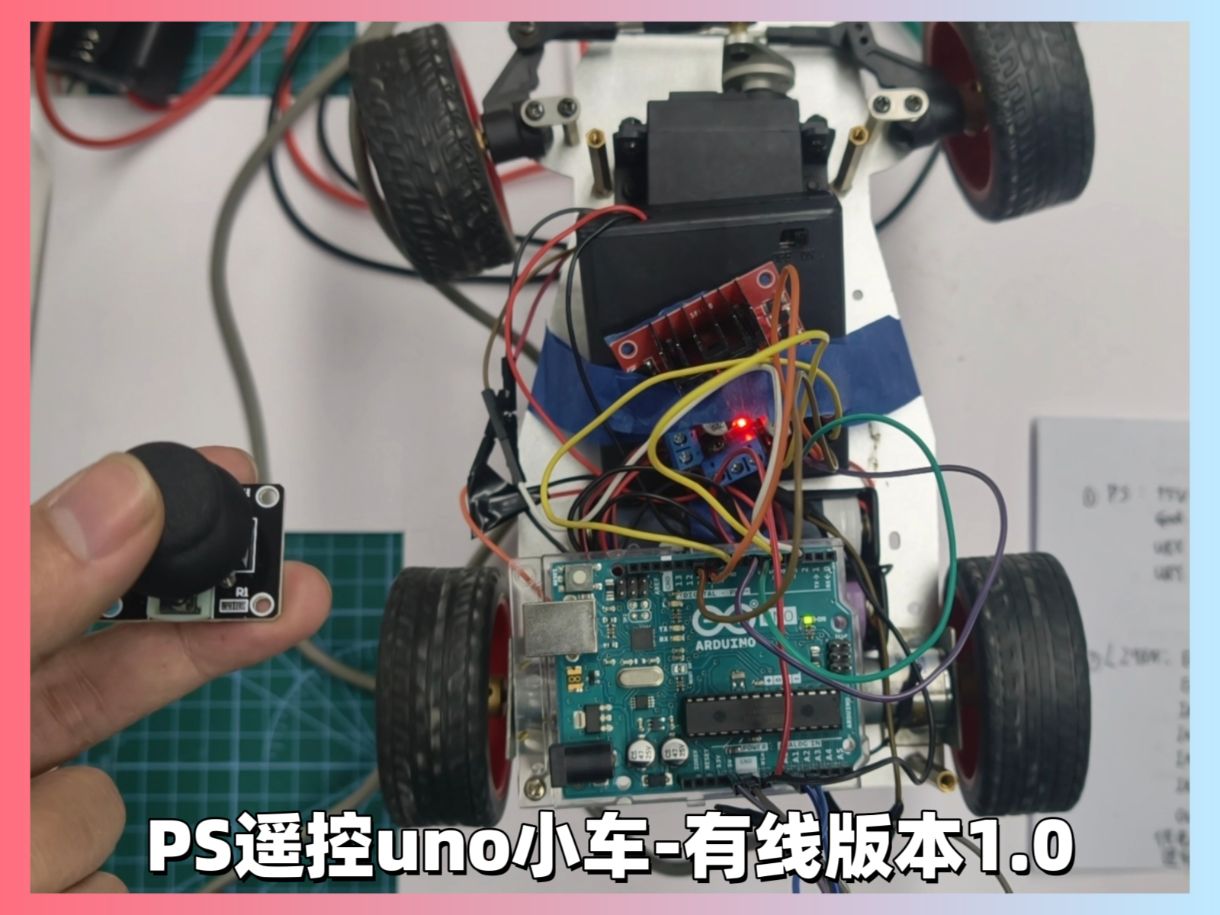
本项目以 Arduino UNO 为主控核心制作了一套完整的有线遥控小车。使用 Arduino IDE 编写代码,读取 PS2 摇杆的模拟量,映射为电机转速与舵机角度,实现 PWM 控制,搭建电机驱动电路(如 L298N 或集成驱动模块),将 Arduino 控制信号放大后驱动电机。这个过程让我深刻体会到,编程不仅是写代码,更是通过亲手搭建与调试,将电子电路、编程知识落地为可交互的实物作品。
准备工作:
材料:
材料名称
数量
备注
金属小车底盘总成
1
带舵机,减速电机
双轴按键摇杆传感器 PS2
1
/
18650*2节电池盒
1
7.4V
5号电池*4节电池盒
1
6V
杜邦线
1
信号线
1
4芯信号线
烧录线
1
UNO数据线
美纹纸
1
/
M3*6螺丝
1
/
工具:
工具名称
数量
备注
剥线钳
1
/
镊子
1
/
剪刀
1
/
电烙铁套装
1
/
螺丝刀
1
/
焊接夹台
1
/
万用表
1
/
1
准备电子配件









2
底盘



3
安装电源模块


4
固定驱动


5
固定UNO


6
连接摇杆


7
电源开关


8
编程调试
9
完成!
 0
0 0
0 0
0 qq空间
qq空间  微博
微博  复制链接
复制链接 猜你喜欢
评论/提问(已发布 0 条)