会说话的保镖机器人——搭载蓝牙音响系统的互动装置
 0
0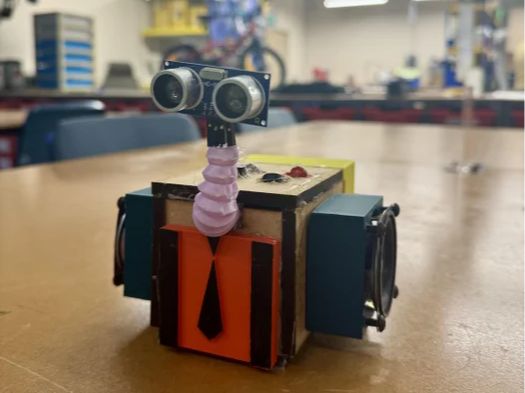
准备工作:
材料:














机器人材料:
- HC-SR04超声波传感器
- LED*2
- 蜂鸣器
- Arduino Nano
- 面包板
- 跳线
- 电源开关
- 22欧姆电阻
- 电池盒(可装4节电池)
- 塑料管
- 红色标记笔
蓝牙音箱:
- 3D打印耗材
- AutodeskFusion
- 迷你音箱*2
- 小型扬声器音频模块
- 电源开关
- 电池盒(可装4节电池)
- 4*电池
- JST电线
- 螺丝*8
- 黑色记号笔
- flashPrint5
工具:










机器人工具:
- 激光切割机
- 烙铁
- 剥线钳
- 热熔胶枪
- 蓝牙音箱工具:
- 3D打印机
- 烙铁
- 剥线钳
- 螺丝刀
- 剪线钳
- 热熔胶枪
编写代码和设置Arduino










该项目的第一步是在搭建电子电路的同时编写 Arduino 代码。
该代码的设计运用了计算思维原理,包括分解、模式识别、抽象和算法。
将分解应用于各个独立任务,包括传感器设置、定义距离阈值以及控制 LED 和蜂鸣器的输出。
模式识别体现在对不同组件重复使用输入/输出结构和条件逻辑上。
抽象化简化了系统,只关注必要的交互——测量距离和激活输出——而省略了不必要的细节。
该算法提供了生成超声波脉冲、计算到物体的距离以及确定是否激活 LED 和蜂鸣器的分步说明。
代码(Arduino IDE):
随后组装电路以运行代码。Arduino Nano 用作微控制器,连接超声波传感器 (HC-SR04)、两个 LED、一个蜂鸣器、电阻器和电源开关。9V 电池组为系统供电。电路图指导了元件在面包板上的放置,确保输入输出设备之间的连接准确无误。在将各个元件集成到完整电路之前,都进行了测试。请查看以上照片,并观看视频了解搭建过程。
至此,Arduino 和电路的设置、编码和搭建就完成了。
制作Arduino机器人外壳






项目的第二阶段重点是构建电路和微控制器的外部结构。这一过程首先是在 xTools 上以数字方式设计外部组件,确保尺寸精确且对齐,以便与之前编写的 Arduino 系统兼容。
外壳是用激光切割机制作的。之所以选择激光切割机,是因为它能够在很短的时间内(最多只需 3 分钟即可完成所有切割)对亚克力和木材(我用的是 6 毫米厚的 MDF 板)等材料进行高精度、干净利落的切割。
为了安装开关、蜂鸣器和两个 LED 灯,我事先钻孔,确保尺寸完美契合。我保证所有连接处都牢固可靠,并且电子元件的开口尺寸符合设计规范。
为了让机器人看起来更有生命力,我用一根可弯曲的塑料管包裹住超声波传感器的电线,使其看起来像脖子,有点像瓦力(Wall-E)。
我使用热熔胶是为了牢固粘合和简单组装。
至此,机器人的“保镖”部分就完成了。
设置蓝牙音箱+连接





在本项目的第三阶段,我专注于添加可正常工作的蓝牙音箱,这样我就可以通过手机(任何支持蓝牙的设备均可连接)播放保镖会说的语音台词(相关视频请参见第4步)。
在这一阶段,我将JST线缆的末端焊接到各自的金属接片上(红色线焊接到正极,黑色线焊接到负极)。
我对第二个音箱也重复了同样的焊接步骤。
我确保使用了足够的焊锡,以避免日后需要重新焊接。
完成线缆焊接后,我将JST线缆的压接端子插入音频模块对应的接口中。
接着,我在电池盒中装入4节电池,并在红色导线上加装了一个开关,以便控制设备的开启与关闭。之后,我将电池盒连接到音频模块上。
设备开启后,会发出四声“哔哔”提示音,随后任何支持蓝牙的设备都可以与其配对并播放声音。
接下来,我使用Fusion设计了一个CAD文件,为音频模块和电池制作了一个外壳,使其隐藏起来,外观更加整洁。下方附上了该外壳的STL文件。我通过连接Adventurer 5M Pro 3D打印机,使用FlashPrint 5软件完成了3D打印。
我用热熔胶将电池盒固定在外壳内部,再将整个外壳安装到激光切割的“保镖机器人”外壳上,同时让开关和两个扬声器分别从外壳两侧的开孔中伸出,从而实现从外部控制音箱系统。
我使用黄色耗材进行打印,但也可以使用任意颜色。
请查看附带的视频、照片和文件,以了解实际操作过程。
至此,蓝牙音箱系统的搭建与连接工作全部完成。
扬声器外壳和装饰品



最后,我只是给扬声器加了一个外壳,加了一个“外壳”,并区分了 LED 灯。
我为 Fusion 上的扬声器设计了一个外壳,这样扬声器在使用改进的立体声设置时声音会更好,并且可以固定在机器人的外壳上。
我用 3D 打印机打印外壳时,把扬声器拧了进去,但留出了一些空间,这样就不会抑制振动。
之后,我把开关安装在了外面,这样既方便使用又方便操作,而且也不会有电线到处乱晃。
然后,我用 3D 打印机打印了这套“西装”,使其更具保镖的感觉,并用黑色记号笔给领带和两侧涂上颜色,使其看起来像一套黑色西装和领带配红色衬衫。
我还用红色记号笔给表示“走开”的 LED 灯涂上了颜色,表明该 LED 灯代表什么,并在 LED 灯下方写上了“走开”和“你没事”,以进一步传达 LED 灯的含义。
外壳我用的是深蓝绿色的耗材,衣服是用红色耗材做的,不过任何颜色的耗材都可以用。
 0
0 0
0 0
0 qq空间
qq空间  微博
微博  复制链接
复制链接