免手持牙刷
 0
0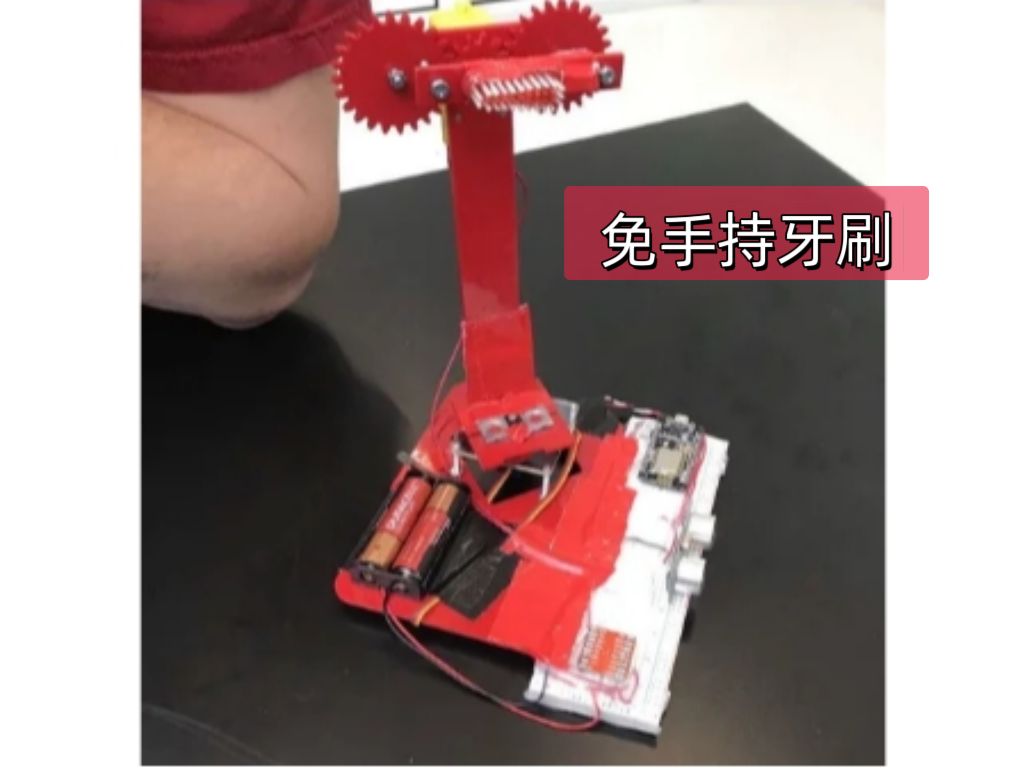
我们希望解决一个有趣的问题,于是决定制作一款无需停下手中的事情就能刷牙的装置。没错,有了这款发明,你可以在刷牙的同时继续发短信、看 YouTube、织毛衣、玩电子游戏,甚至还能用双手做其他事情。
上图展示的是成品。整个机械臂由连接到底座的伺服电机驱动旋转,牙刷则由直流电机前后驱动。齿轮使牙刷能够做圆周运动而不旋转。当有人靠近插入面包板的超声波传感器30厘米以内时,牙刷就会启动。它会先刷中间的牙齿,然后转向刷左侧的牙齿,最后转向刷右侧的牙齿。
1
获取所有部件




2
组装底座和臂



3
连接底座和臂


4
接线


5
刷牙!

 0
0 0
0 0
0 qq空间
qq空间  微博
微博  复制链接
复制链接 猜你喜欢
评论/提问(已发布 0 条)