无刷电机推力架
 0
0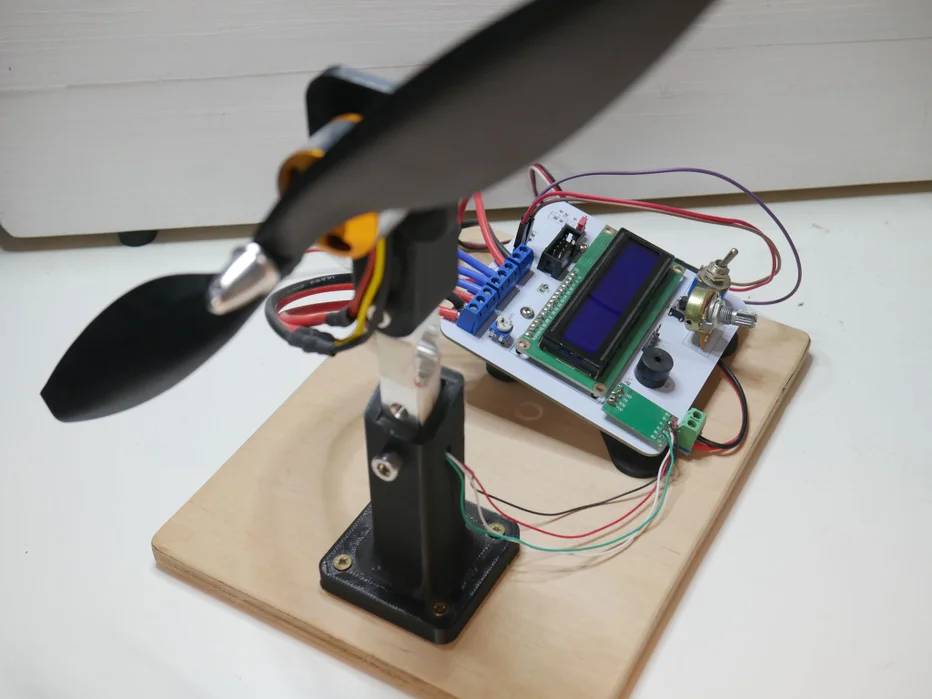
准备工作:



PCB




我花了很多时间在 PCB 的设计上,我想让它尽可能完美,结果相当不错!至少它看起来比我的其他 PCB 更专业 :D 在上面你可以找到制作你自己的 PCB 的文件。如果你想在面包板或原型板上构建它,也有原理图(你可以毫无问题地做到这一点)。我在 PCB 上添加了很多东西,因为在分析之后,我认为它会更容易使用。例如,我添加了螺丝端子来连接电机和 ESC,所以如果你想测试另一个电机,你不必拆焊它。还有比我实际使用的更多的组件(我不使用电压调节器,因为我使用内置于电子速度控制器(ESC)的电池消除电路(BEC)。还有一个我没有使用的开关和按钮,但也许你想更改代码或添加一些功能。
焊接




如果您在面包板上搭建,可以跳过此步骤,但对于 PCB 来说,这步至关重要 :) 焊接时,请一如既往地从最小的 SMD 元件开始。Atmega328 SMD 元件不易焊接,如果您没有经验,可以寻求帮助。Atmega 隐藏在 LCD 显示屏下方。张力梁模块也应焊接到 PCB 上,如上图所示。电流传感器应焊接在 PCB 底部(我知道这不是最好的解决方案,但对我来说效果还不错)。
基础

我们还需要搭建一个底座,并用 3D 打印一些组件。我用 8 毫米厚的胶合板作为底座,然后用黑色 PLA 打印出 STL 文件。最后我用螺丝把所有部件固定好。
代码

这是你需要上传到Arduino的代码,它非常简单简短,它所做的就是从传感器读取数据并将其显示在LCD屏幕上,没有复杂的数学运算或任何花哨的编程。我不喜欢代码中的注释,所以如果你有任何问题,尽管问我 :)
测试


一切准备就绪后,我们就可以测试了!小心,无刷电机动力强劲,加上大螺旋桨,非常危险。您可以使用任何与您的电机和电调兼容的电源(如果您使用BEC电源)为其供电。我使用的是实验室的电源,有时功率不足以支持这款电机。在液晶显示屏上,您可以看到电机的推力、电流、油门值和功耗。这些数据对于设计一款优秀的四轴飞行器以及为电机选择合适的螺旋桨至关重要。
结论

希望你喜欢这篇教程!如果你有任何问题或想法,请在评论区告诉我!
 0
0 0
0 0
0 qq空间
qq空间  微博
微博  复制链接
复制链接