手把手教你做浏览器可控的智能机器人
 0
0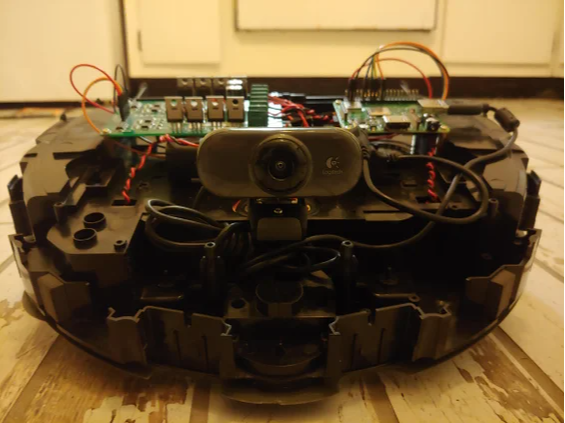
准备工作:
材料:
- 树莓派 3 A+
- Riorand 双电机驱动控制器
- 电机用 12V 电池
- 树莓派用 5V 电池
- 8GB micro SD 卡
- 杜邦线
- Roomba 500 系列
安装 Raspbian 系统并设置静态 IP

我用的是 Raspbian Stretch Lite 系统,没必要装桌面版,当然你想装也可以。
先假设你已经会装 Raspbian 了(不会的话可以查树莓派基金会的官方指南)。系统装好后,登录并运行 raspi-config 配置工具:
- 配置 WiFi:选 “2 Network Options”→“N2 Wi-fi”,选国家、输 WiFi 名称(SSID)和密码。
- 开启 SSH:回到主菜单,选 “5 Interfacing Options”→“P2 SSH”,选 “是”。
- 完成后选 “<Finish>” 退出。
验证网络连接:
会显示 IP 地址(比如 192.168.1.18),记下来。再 ping 一下谷歌验证联网:
设置静态 IP(确保每次连接地址不变):
打开 dhcp 配置文件:
找到 “#Example static IP configuration”,去掉注释并修改(按自己的网络填):
保存退出,重启后用 SSH 连接(Windows 可用 PuTTY 或 WSL):
安装并配置 Motion(视频流工具)

Motion 是个常用于安防摄像头的程序,我们用它让摄像头通过 8081 端口输出视频流。
先测试摄像头:插好摄像头,列 USB 设备(可能需要重启):
pi@raspberrypi:~ $ lsusb
如果显示类似 “Logitech C210”,说明摄像头正常;没显示的话可能不兼容或需要装驱动。
安装 Motion:
修改配置文件:
改这些参数:
设置开机启动:
改 “start_motion_daemon=yes”,保存后重启:
测试视频流:在浏览器输入 “http:// 你的静态 IP:8081”(比如http://192.168.1.18:8081),能看到画面就成功了。
安装 Apache 并设置网页控制界面

Apache 是机器人控制页面的 web 服务器。我们要把默认的 index.html 换成从 GitHub 下载的文件,再改几行代码让它显示视频流和发送控制命令。
安装 Apache 和 Git:
下载代码:
进入文件夹,把 index.html 复制到 Apache 的网页目录:
修改 index.html:
找到这两行,把 “YOURIPADDRESS” 换成步骤 1 设的静态 IP:
测试:在其他设备浏览器输入树莓派 IP,左边会显示摄像头画面,右边是控制按钮,就对了。
设置并测试控制代码

控制代码是 Python 写的,需要 Tornado 库,它会通过 9093 端口的 WebSocket 接收网页的控制命令。
安装依赖:
运行程序并测试:
终端显示 “Ready” 后,在浏览器打开控制页面,点 “连接”,再点方向按钮(或按键盘箭头),终端会显示类似 “Running Forward”“Turning Left” 的反馈,说明成功。按 ctrl+c 停止程序,关机用:
小问题:网页的 “关机” 按钮偶尔没反应, workaround 是刷新页面、重新连接后再点。
组装












如前所述,不一定非要用 Roomba,有两个电机、两个轮子和底盘的都能用。我把 Roomba 拆开,只留了轮组和电池。
- 轮组:Roomba 的轮子和电机是一体模块,每个模块有蓝色外壳,内含电机、齿轮箱、轮子、悬架弹簧和接口板。
- 接口板:每个板有 6 根线(电机正负极、霍尔传感器线、掉轮检测线、5V 线、地线)。我拆到电机部分,直接给电机焊了新的正负极线(传感器可保留也可拆)。
- 悬架弹簧:拆了吸尘器部分后,Roomba 重心会偏,没弹簧会倾斜;但留着弹簧能更好地过地毯,我最后装回去了。
电机与控制器接线:
- 电源:12V 正极接 Roomba 电池正极,12V 负极接电池负极。
- 电机 2(左):黑色接左电机负极,红色接左电机正极。
- 电机 1(右):黑色接右电机负极,红色接右电机正极。
控制器与树莓派接线:
电机控制器引脚 | 线色 | 树莓派引脚 |
GND | 黑色 | GND |
PWM 2 | 蓝色 | GPIO 18 |
DIR 2 | 绿色 | GPIO 23 |
PWM 1 | 黄色 | GPIO 24 |
DIR 1 | 橙色 | GPIO 25 |
5V | 红色 | 5V |
安装电子元件:拆光 Roomba 外壳后,剪掉原有塑料柱,钻孔固定元件;电机线从原有孔穿出,电池接口用原有缺口。
电池:树莓派用 5V 手机充电宝,电机用原 Roomba 电池。电池正负极没标,先用电表测电压。我用 4 块钕磁铁接电池:两块焊在电线上,另外两块粘在电池端子上(焊接会消磁,但外层镀层仍能导电),这样插拔很方便。
测试:把机器人架起来(防止乱跑),开机后登录并运行程序:
在网页控制页面测试,轮子能按指令转就没问题。
设置开机启动代码


最后一步:让树莓派开机时自动运行控制程序。用脚本加 crontab 实现。
创建脚本:
输入以下内容:
保存后设为可执行:
测试脚本(按 ctrl+c 停止):
设置开机启动:
在文件末尾加一行:
保存后,树莓派重启或通电时,程序会自动运行。
==========================================
结语
到这一步,你就有了一个能在局域网内通过浏览器控制的机器人。我后来还加了 VPN,方便出门时远程控制。未来打算让它实现自主导航,或者能跟拍移动目标,同时保留手动控制功能。
 0
0 0
0 0
0 qq空间
qq空间  微博
微博  复制链接
复制链接