智能柔性爪
 0
0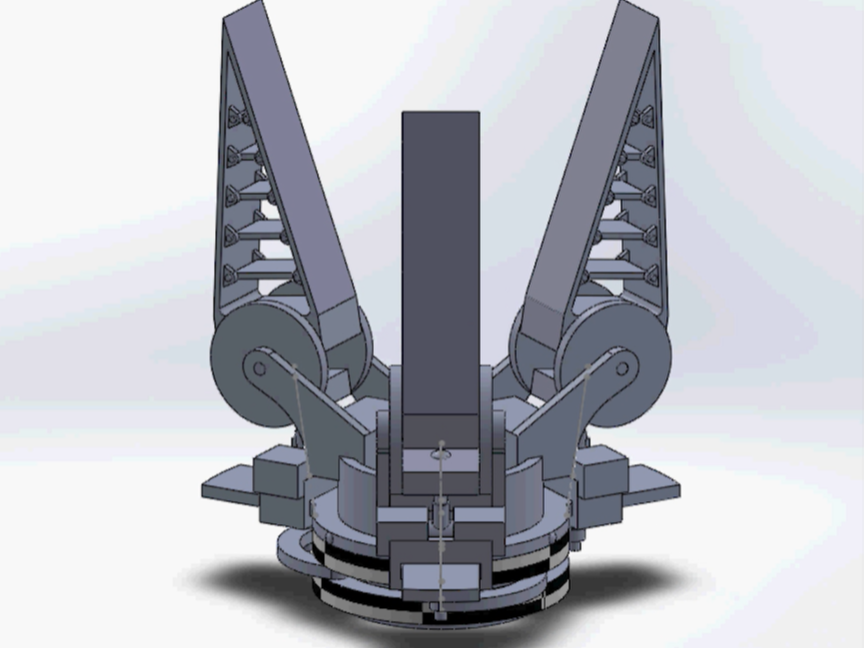
准备工作:
材料:
第一步是检查所有部件,并根据需要进行调整。为此,我强烈推荐使用 Solidworks,因为一旦您了解所有命令的位置,它就会非常易于使用。如果您尚未下载,请务必咨询您的学校或工作单位,了解折扣或免费访问代码。如果您需要更清楚地了解每个功能,YouTube 也是您的最佳选择。接下来的几个步骤将介绍如何使用 Solidworks 设计 Flex Claw 需要 3D 打印的部件。
在收集材料之前,请仔细阅读所有步骤,并确认下列步骤适合您最终的成品。尽管不建议这样做,但您可以对所讨论的部件的尺寸进行任何个性化调整。以下材料与原始步骤的构建过程一致。
- 12英寸 x 24英寸 x 0.125英寸胶合板
- PVC管外径4英寸,长约5英寸,壁厚0.125英寸
- 握把胶带
- 6/32 英寸螺钉,1.5 英寸长 x 6,配有合适的螺母
- 直径 0.125 英寸的铝棒,长 6 英寸,适合将来切割的钢锯
- 插座连接至少 2.5 安培输出(I-Phone/I-Pad 充电器可用)
工具:
- 可与 NinjaFleax 和 PLA 灯丝兼容的 3D 打印。
- 胶合板激光切割机(建议使用精确尺寸,但经验丰富的技术人员也可以使用)
- 带 3/16 钻头的电钻
- 德美尔
- 完整的 Arduino Uno 套件(电线、连接线等),包括接近传感器、LED 灯(带相应的电阻器)、按钮和 2 个步进电机(根据查找结果和摩擦阻力,可能需要更强大的电机)。
爪子:外部

现在有了 Solidworks,我们就可以开始建模外部爪子的设计了。建议将此作为第一步,因为该部件需要使用 NinjaFlex 耗材进行 3D 打印,而 NinjaFlex 耗材的成型时间比大多数塑料更长,而且可能需要外部来源的兼容该耗材的 3D 打印机。
爪子是该项目的关键特征,因为它可以弯曲成任何被握持物体的形状。通过采用非常灵活的薄壁外部结构,我们可以利用其自然的可折叠性,最大限度地增加接触表面积,从而实现更佳的抓握效果。然而,另一方面,它仍然需要内部刚性桥来维持其结构,并在接触时施加压缩力(步骤3)。
这些是制作一个爪子所需的零件,所以要准备好打印 3 倍数量的零件来制作 3 个爪子。一个很好的建议是,只要打印床上有足够的空间,我们就可以同时打印多个部件。但这也可能会增加挫败感,如果一个部件在打印过程中损坏,那么我们也需要停止打印其余的部件。打印床上的零件太多也可能导致某一部件的塑料层在添加下一层之前硬化过度(因为机器必须绕到其他部件),并导致部件中间弯曲。体验你的 3D 打印机可以处理的事情是最好的事情,但请记住,一次可以打印多个部件。
除了 SolidWorks 零件文件外,还附上了 SolidWorks 图纸,其中显示了所使用的测量值。虽然大多数长度可以调整以更好地适合您的住宿条件,但任何更改都需要应用到其他部件上,以确保所有部件都能完美契合。因此,建议您在仔细检查每个步骤并考虑最终结果后再进行调整。以上是设计预期模型的基本步骤。
爪子:内部桥梁

接下来是爪子的内部桥接结构。外部爪子的设计需要用 NinjaFlex 打印以增加灵活性,而这些桥接结构则需要用 PLA 耗材打印。这些材料将具有刚性,并充当骨骼,在爪子弯曲时维持其结构,并在接触时施加压缩力。
除了 SolidWorks 零件文件外,还附上了显示所用尺寸的 SolidWorks 零件图。这些尺寸与爪子设计的其余部分兼容,以便所有部件能够完美契合。因此,请确保对之前零件的任何个性化调整,如有必要,也适用于这些零件。此外,以下是设计预期模型的基本步骤。
(这些是制作一只爪子所需的零件,因此要准备好 3D 打印 3 倍数量的零件来制作 3 只爪子)
滑块

Slider 由 4 个部分组成:1 个主滑块、1 个带支柱的鼓轮以及 2 个“滑块附件”。这种设计使得滑块可以完全包裹鼓轮,而不会限制其在凹槽内旋转的能力。由于附件只需卡入主滑块并盖住鼓轮即可,因此无需使用螺丝。
除了 SolidWorks 零件文件外,还附上了显示所用尺寸的 SolidWorks 零件图。这些尺寸与爪子设计的其余部分兼容,以便所有部件能够完美契合。因此,请确保对之前零件进行的任何个性化调整,在必要时也适用于这些零件。
(这些是制作一只爪子所需的零件,因此要准备好 3D 打印 3 倍数量的零件来制作 3 只爪子)
鼓和线束

滚筒和滚筒线束是连接爪子和滑块的中间部件,使滑块在向外移动时向前旋转。与之前必须 3D 打印的部件不同,这些部件可以用木头和铝棒代替。但不建议这样做,因为它们的尺寸非常精确,无法与其他部件连接在一起,尤其是线束底部的凹槽,需要与 PVC 管边缘的厚度和曲率相匹配。请根据您现有的 PVC 管检查此参数,或记下它以找到合适的尺寸。
在接下来的步骤中,我们将组装这些部件,使鼓形连接器的底部孔与滑鼓的轴相配合,并使鼓形半块上较宽的一对支柱能够穿过爪形外部底部的通孔。话虽如此,这些尺寸与爪形设计的其他部分兼容,以便所有部件能够完美契合。因此,请确保对之前部件进行的任何个性化调整,在必要时也适用于这些部件。
(这些是制作一只爪子所需的零件,因此要准备好 3D 打印 3 倍数量的零件来制作 3 只爪子)
小齿轮和齿圈




这就是动力的来源。由于小齿轮和齿圈非常特殊,因此在3D打印时无需更改。小齿轮轮毂的整体配合仅适用于上述基本步进电机。如果需要使用其他电机,且轴尺寸不同,可以在SolidWorks文件中进行调整。本模型使用了两个步进电机,因此请确保打印两个小齿轮。
除了 SolidWorks 零件文件外,还附上了显示所用尺寸的 SolidWorks 零件图。这些尺寸与爪子设计的其余部分兼容,以便所有部件能够完美契合。因此,请确保对之前零件进行的任何个性化调整,在必要时也适用于这些零件。
径向臂和旋转木马


随后,将旋转架放置在齿圈上方,并旋转半径连杆使其朝向和远离滑块,从而推动滑块前后移动。虽然设计简单,但不建议用木材和支撑松散的铝棒代替旋转架,因为整个部件必须足够坚固,才能绕 PVC 管旋转而不晃动。总共需要 3 个半径连杆。
除了 SolidWorks 零件文件外,还附上了显示所用尺寸的 SolidWorks 零件图。这些尺寸与爪子设计的其余部分兼容,以便所有部件能够完美契合。因此,请确保对之前零件进行的任何个性化调整,在必要时也适用于这些零件。
基础电机箱

除了单独的爪子之外,这部分可能是第二复杂的。3D打印将是你的好帮手,即使它尚未证明自己的价值。这个底座的尺寸经过测量,特别适合我使用(也是推荐的)的PVC管接头,外径4英寸,壁厚0.25英寸,靠近边缘有一个倾斜的边缘。请检查尺寸并进行修改,以更好地适应你正在使用的管道。管道出售时通常也会标明内径。所以在这种情况下,如果我需要一根外径4英寸、壁厚0.25英寸的管道,我应该留意3.5英寸的接头。无论如何,你拿着尺子去商店买管子总不会错。
此底座旨在安装两个用于 Arduino Uno 的 28BYJ-48 5VDC 步进电机。虽然这些电机更容易编码,但它们的强度并不为人所知。在环形滑块上涂抹石墨粉或其他干性润滑剂可以大大减少摩擦。否则,如果可以使用更强劲的电机,则需要对底座进行重大设计更改,建议在使用此设计搭配两个基础步进电机后再进行更改,以便您能够看到最终布局将如何产生显著的变化。
这个底座也设计用于将面包板滑入侧面的矩形插槽中。为此,我们计划使用一个宽度为 2.25 英寸、高度为 0.375 英寸的横截面,因为这是大多数面包板的标准尺寸。同样,与电机一样,如果要使用其他尺寸的面包板,请等到最终电路布局完全确定后再进行修改。
分支滑轨

这个环需要钻入PVC管中,以便滑块尽可能稳定地滑动。这个部件通常太大,无法3D打印,所以我强烈建议你使用木材激光切割机,或者去木工店练习一下圆边技巧。这样,厚度可以调整,以便更好地适应滑块,但一定要留出一些活动空间。在后面的步骤中,我们将讨论将其固定到结构上的最佳方法。
除了 SolidWorks 零件文件外,还附上了显示所用尺寸的 SolidWorks 零件图。这些尺寸与爪子设计的其余部分兼容,以便所有部件能够完美契合。因此,请确保对之前零件进行的任何个性化调整,在必要时也适用于这些零件。
 0
0 0
0 0
0 qq空间
qq空间  微博
微博  复制链接
复制链接