模拟摇杆板
 0
0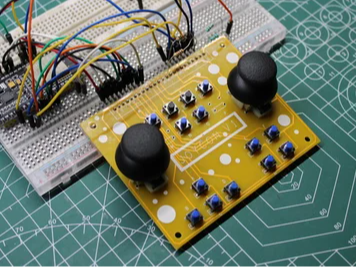
JOYCON 板设计用于对涉及按钮或操纵杆的任何项目进行原型设计,适用于面包板,并配有按钮和模拟摇杆。
制作该板的目的是使用 ESP32 微控制器来构建游戏控制器。目标是创建一个可以在进入下一版本之前进行测试的电路板,其中将包括一个带有按钮和操纵杆的 ESP32 Wroom 微控制器。
准备工作:
材料:
材料名称
数量
备注
模拟遥控杆
1
切换按钮
1
公头针连接器
1
面包板
11
ESP32
1
跳线
1
1
PCB设计





2
电路板组装




3
组装结果

4
测试


5
游戏控制器实现-ESP32游戏控制器



6
编码实现

7
结果



 0
0 0
0 0
0 qq空间
qq空间  微博
微博  复制链接
复制链接 猜你喜欢
评论/提问(已发布 0 条)