Arduino 蓝牙小车
 0
0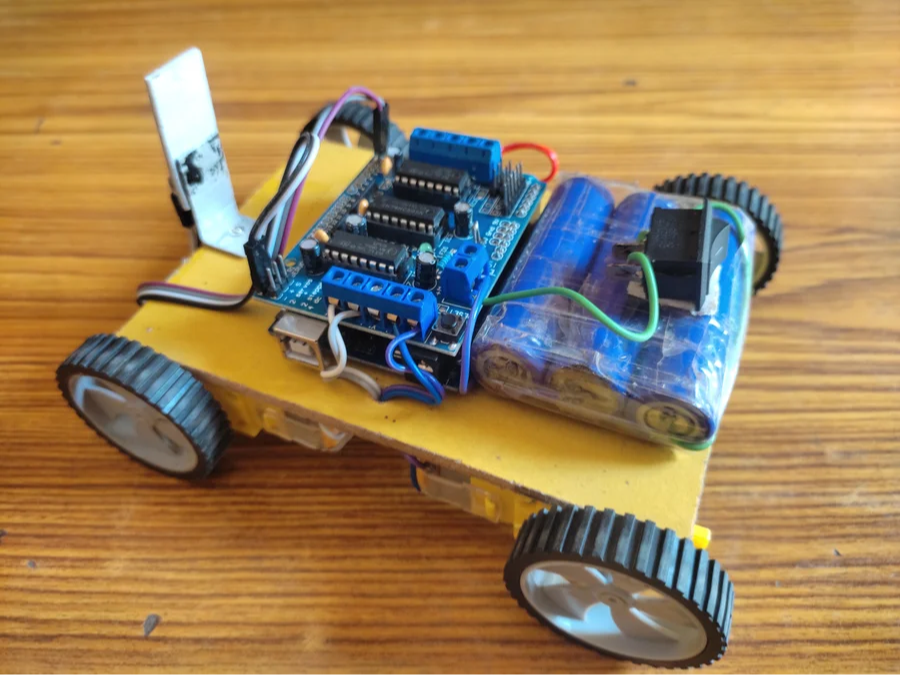
准备工作:
材料:








完成该项目所需的硬件列表。
http://www.quartzcomponents.com
- Arduino UNO
- Adafruit 电机护罩
- 四齿轮电机
- 四轮车
- HC-05蓝牙模块
- 3 个锂离子电池
- 转变
- 跳线(母对母)
- 带状线
- USB 线(arduino Uno 支持)
- 胶水
- 双面胶带
- 带螺钉的铝制 L 形条
从中密度纤维板 (MDF) 上切下一小块

第一步,我们切割MDF板,得到一块面积较小的矩形MDF板(15cm X 10cm)。然后,我们在这块板上钻两个孔,以便将电线从下侧穿到上侧。
将电线焊接到齿轮电机上

在步骤 2 中,我们从带状电缆中剪下 8 根 5 厘米长的电线,并将这些电线焊接到齿轮电机的端子上。
将齿轮电机固定在中密度纤维板上



在步骤 3 中,我们使用胶水或 Fevicol 将齿轮电机固定在 15x10 MDF 板上。我们可以借助给定的图像来了解如何将电机固定在板上。
将 Arduino Uno 与 Motor Shield 连


在步骤 4 中,我们将 Adafruit 电机护罩固定在 Arduino Uno 上,如给定的图片所示。
将Arduino Uno和电机护罩放置在底盘上


在步骤 5 中,我们借助双面胶带将 Arduino 和 Adafruit 电机护罩固定在底盘上,如上图所示。
将齿轮电机连接到电机护罩


在步骤 6 中,我们将齿轮电机的电线连接到 Adafruit 电机护罩。为此,我们还需要一个螺丝刀来旋转接线板的螺丝。您可以借助电路图或给定的图像在齿轮电机和 Adafruit 电机护罩之间建立正确的连接。
安装电池组


在步骤 7 中,我们借助双面胶带将电池组固定在底盘上。我们还将电池组的 +Ve 线焊接到开关的一个端子上,并取另一根线并将其一端与开关的第二个剩余端子焊接在一起,另一端连接到电机屏蔽的 +Ve 电源引脚。
进一步将电池组的 -Ve 线连接到电机护罩的 -ve 电源端子。如给定图像所示。
安装HC-05模块

在第 8 步中,我们用螺丝和螺丝刀将 L 形铝固定在底盘上。在用双面胶带将我们的 HC-05 蓝牙模块连接到它之后,我们使用跳线将 HC-05 模块与 adafruit 电机屏蔽连接起来,如图所示。
将车轮连接到汽车


在第 9 步中,我们将 4 个轮子连接到齿轮马达的轴上,如图所示
编程

在最后一步中,我们必须使用 Arduino IDE 对 arduino Uno 开发板进行编程,因此我们使用 USB 数据线将机器人小车连接到笔记本电脑或计算机。在将草图上传到 Uno 开发板之前,我们需要移除连接到 arduino Uno 的 TX 和 RX 引脚的两根跳线。这是必须的,否则我们的 arduino IDE 会给出编程错误。成功上传 ketch 后,再次将两根电线(我们已移除)连接到其位置。现在我们的蓝牙小车已准备好进行测试,剩下要做的就是从 Play 商店在我们的 Android 手机上安装蓝牙汽车应用程序。在您的 Android 手机上安装该应用程序后,打开机器人小车的电源按钮,打开您的 Android 手机的蓝牙,并将其与我们汽车的蓝牙配对,与蓝牙配对后,现在一切就绪。
从Google Play商店下载Android应用程序



要使用安卓手机操作蓝牙汽车,我们需要从谷歌应用商店下载一个应用程序。下载应用程序后,将其安装在您的安卓手机上。
链接:https://play.google.com/store/apps/details?id=braulio.calle.bluetoothRCcontroller
代码
 0
0 0
0 0
0 qq空间
qq空间  微博
微博  复制链接
复制链接